光學一直是科技創新的重頭戲,智能手機攝像頭經歷��2D時代像素和個數的倍增,孕育了大立光等優質公司��3D成像技術的成熟拉開了二維向三維升級的帷幕,有望帶動光學創新大革命(絕非“微創��”可比),本文作為市場首篇深度剖析,將為投資者挖掘相關投資機會��
1��3D 成像究竟是什么?
光學升級一直停留在像素、感光等二維層面,也是智能手機創新周期的主驅動力��3D成像在二維的基礎上,實現了像素景深的疊加,拍照的同時記錄下對象的立體信息,推動人臉識別、虹膜識別、手勢控制、機器視覺等變為現實,是開啟AI和AR時代的感知鑰匙��
2、為什么說3D 成像即將帶動下一輪光學創新浪潮?
1)空間:交互向三維升級,遠非平面像素升級可比��
2)產業鏈:已實現商用,我們判斷結構光方案大概率成��2017年某頂級品牌殺手锏;
3)成本:有望實現對傳統生物識別的替代,性價比極高;
4)廠商意愿:目前了解到國產大廠跟進意愿極強��
3、為何我們強調要重視3D 成像��
1)大概率爆發,堪比五年前的觸屏,一年前的雙攝;
2)預期差極大:產業鏈新,產業和資��3D 成像認知度都不高��
4��3D 成像爆發,潛在受益環節有哪些?
3D成像主要有發射端和接收端組成,我們預計關鍵器件產能很可能被鎖定,嚴重供不應求,核心零組件擁有充分定價權。發射端高端激光發射器(VCSEL)和準直鏡頭產能和專利被頂級公司綁定,接收端窄帶濾光片產能瓶頸明顯。同��3D成像將帶動攝像頭模組單價大幅提升��
投資評級與估��
我們認��3D成像未來兩年將實現快速普及,目前存在強烈的預期差,強烈看好產業鏈具備核心競爭力的公司,首推濾光片龍頭水晶光電,看好核心器件LITE.O、VIAV.O、STM.N、AMS.SIX,模組公司舜宇、歐菲光、丘鈦等大概率受益��
有別于市場的觀點:
1)我們判斷頂級品牌將采用前置結構光,3D成像和虹膜融合;
2)未來兩年前置結構光+后置TOF有望得到推廣��
3)國產手機跟進意愿強烈,預計明年3D成像即將普及��
風險提示:客戶推進不及時;耗電量過大影響待機;手機銷量不及預期��
報告正文
1��3D成像,交互實現向三維的飛��
1.1 光學的升級一直停留在二維的像素提��
拍照一直是智能手機的重要賣點,像素和拍照性能是換機的主驅動力之一,以iPhone為例,后置相機從單顆2M升級到雙12M,前置相機從無到8M,其性能提升幅度遠超其他任何零組件��
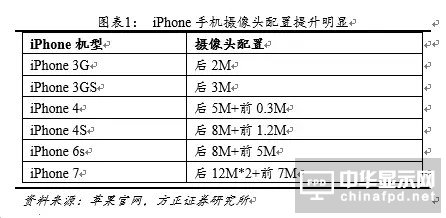
雖然光學性能提升幅度巨大,但是仍然沿用著最傳統的原理:二維成像,即把現實三維世界的圖像信息映射到二維的CMOS感光元件上實現成像��
1.2 3D成像包含像素景深信息的疊��
普通攝像頭都是2D平面成像的,丟失了物理世界中的第三維信息(尺寸和距離等幾何數據),計算機只能實現影像記錄和平面圖像特征識別,分析算法難度極大,目前能夠實現的智能分析功能十分有限��
3D成像能夠識別視野內空間每個點位的三維坐標信息,從而使得計算機得到空間��3D數據并能夠復原完整的三維世界并實現各種智能的三維定位��
1.3 目前主流��3D成像包括結構光、TOF和雙��
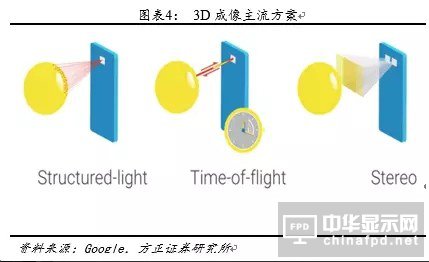
主流��3D 成像技術有三種��
1)結構光(Structured Light)。結構光投射特定的光信息到物體表面后,由攝像頭采集。根據物體造成的光信號的變化來計算物體的位置和深度等信息,進而復原整個三維空間��
2)TOF(Time Of Flight,飛行時間)。通過專有傳感器,捕捉近紅外光從發射到接收的飛行時間,判斷物體距離��
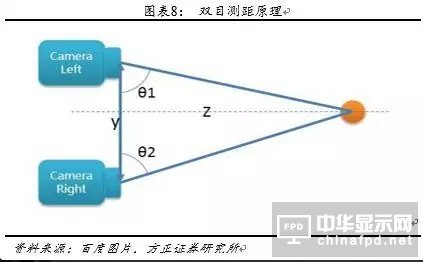
3)雙目測距(Stereo System)。利用雙攝拍攝物體,再通過三角形原理計算物體距雀��

1.3.1 結構光的原理及實��
1)結構光的原��
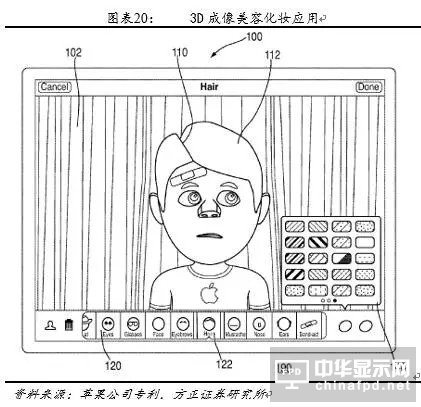
結構光顧名思義就是有特殊結構的光,比如離散光斑、條紋光、編碼結構光等。將這樣的一維或二維的圖像投影至被測物上,根據圖像的大小畸變,就能判斷被測物的表面形狀即深度信息。舉個例子,拿一個手電照射墻壁,站近或站遠,墻上的光斑是不同大小的,從不同角度照射墻,光斑也會呈現不同的橢圓。這就是結構光的基礎。而深度計算的方式也有多種,如我們這里重點說一下被蘋果公司收購的以色列PrimeSense公司Light Coding方案��
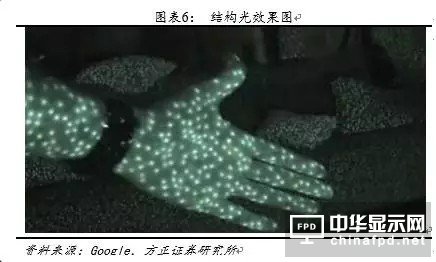
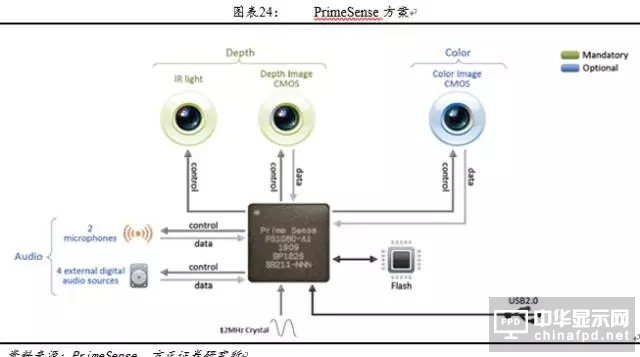
Light Coding的光源稱��“激光散��”,根據PrimeSense在專利中的描述,紅外激光生成器射出準直后的激光束,通過光學衍射元件DOE(Diffractive Optical Elements,如擴散片和光柵)進行衍射,進而得到所需的散斑圖案。這些散斑具有高度的隨機性,而且會隨著距離的不同而變換圖案。也就是說空間中任意兩處的散斑圖案都是不同的。只要在空間中打上這樣的結構光,整個空間就都被做了標記,把一個物體放進這個空間,只要看看物體上面的散斑圖案,就可以知道這個物體在什么位置了��
當然,在這之前要把整個空間的散斑圖案都記錄下來,所以要先做一次光源基準標定(pattern)。Light Coding 發射940nm波長的近紅外激光,透過diffuser(光柵、擴散片)將激光均勻分布投射在測量空間中,再透過紅外線攝影機記錄下空間中每個參考面上的每個散斑,形成基準標定。標定時取的參考面越密,則測量越精確。獲取原始數據后,IR傳感器捕捉經過被測物體畸變(調制)后的激光散斑pattern;通過芯片計算,可以得到已知pattern與接收pattern在空間(x�� y�� z)上的偏移量,求解出被測物體的深度信息��
2)技術實��
結構光的實現難度有如下幾個方面:1)首先是經濟成本,深度攝像頭遠高于一般的攝像頭;2)攝像頭需要的空間和功率限制,手機攝像頭已經可以做到很小的體積和很小的功率,但是深度攝像頭還很難,特別是如果希望能達到比較高的精度��3)很多深度攝像頭是需要額外光源的,因此還要專門的散熱設備��4)后端的軟件匹配��
1.3.2 TOF原理及技術實��
1)TOF原理
Time of Flight是一種主動式深度感應技術,在每個像素點,除了記錄光線強度信息之外,也記錄下來光線從光源到該像素點的時間(即Time of Flight)。首先讓裝置發出脈沖光,同時接收目標物的反射光,藉由測量時間差算出目標物的距雀��#p#分頁標題#e#
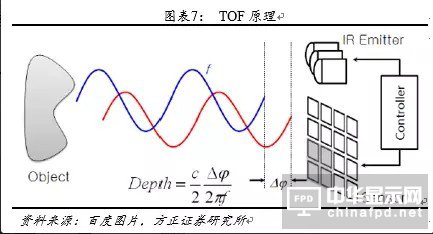
如上圖所示,假設脈沖波形的頻率為f,接收與發送脈沖波形的相位偏移��?φ,則?φ��2πf為脈沖波形往返所經歷的時間。用光速c乘以時間則可以得到往返距雀��
2)TOF技術實��
TOF的硬件實現方式和結構光類似,區別只是在于算法上,結構光采用編碼過的光pattern進行投射,而TOF直接計算相位差��
1.3.3 雙目測距,傳統的3D感知方法
雙目測距原理類似人的雙眼,在自然光下通過兩個攝像頭抓取圖像,通過三角形原理來計算并獲得深度信息。目前的雙攝就是雙目測距的典型應用��
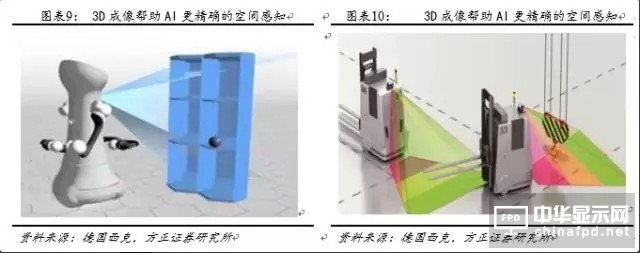
1.4 3D成像是開啟AI和AR時代的感知鑰��
以AI的機器視覺為例,目前主流��2D圖像上通過算法實現智能識別,但是由��2D圖像本身包含的信息有限,即使算法再先進,輸入信息將成為智能化的短板,如果能夠有全面的三維信息,每個對象的三維輪廓、物理特征將更為充分識別,提升導航、軌跡、識別等AI應用能力。同樣的,AR應用��3D成像也是必不可少��
2��3D成像即將帶動下一輪光學創新浪��
2.1 交互向三維升級,想象空間巨大
縱觀人機交互的歷史,打孔指令帶、DOS系統+鍵盤形成了早期一維人機交互;Windows+鼠標的二維交互方式開啟了互聯網/PC時代,觸摸屏和攝像頭的二維交互方式則開啟了移動互聯網/智能手機時代,而到了以AR為代表的下一代計算平臺,則需要三維的交互方式��
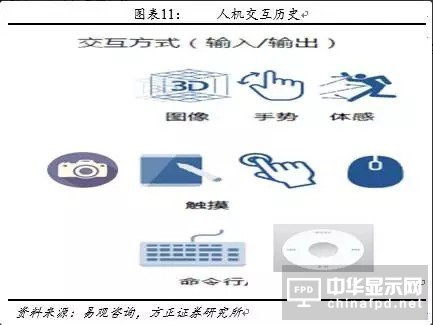
在移動互聯網時代,觸摸屏和攝像頭成為主要的人機交互媒介。觸摸屏可以方便地實現各種操作,相比鍵盤和鼠標更為自然和順暢。攝像頭實現了大量的內容輸入,也是一種重要的人機交互媒介��

但觸摸屏和攝像頭仍屬��2D的交互方式。在觸摸屏上,我們只能實現平面范圍內的感應和觸控,即使出現了3D Touch等新的觸控方式,人機交互也依然只局限在一個平面上。而現有的攝像頭則只能實現2D圖片的拍攝,無法實現3D圖像的交互��
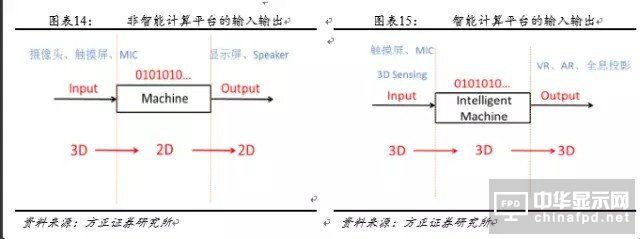
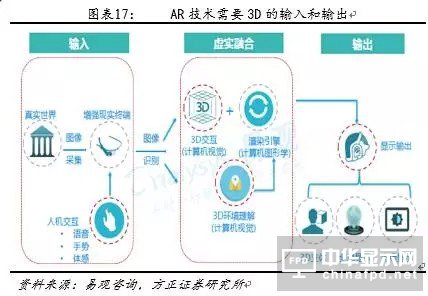
而到了以AR為代表的下一代計算平臺,則需��3D的交互方式,這是由AR設備的定義所要求的。AR技術是指借助計算機視覺技術和人工智能技術產生物理世界中不存在的虛擬對象�� 并將虛擬對象準確“放置”在現實世界中。通過更自然的交互,呈現給用戶一個感知效果更豐富的新環境��

由于現實環境��3D的,所以AR技術為了實現逼真的效果,也需要產��3D的虛擬對象,并把3D的虛擬對象疊加顯示在現實的物理環境中,這就要求AR設備可以實現3D的輸入和輸出��
由于AR所需要的��3D的交互,所以現有的觸摸屏和攝像頭等2D的交互方式并不滿足AR的要求,需要新的交互技術��
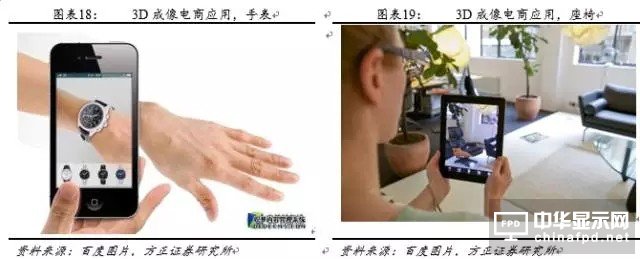
三維交互的應用廣泛:精確的臉部識別可以用于解鎖、支付;精確的手勢及動作識別可以用于家庭游戲娛樂;精確的人形建模可以讓網購更有效率,讓移動社交更真實。而全球生物識別(2015��130億美金)、游戲(2016��996億美金)、B2C電商��2015��2��2萬億美金)加在一起粗略統計是一個超��2萬億美金級別的市場。哪怕三維成像應用滲透率只有10%,都將造就一個萬億人民幣級別的市場規模��3D成像的未來想象空間巨大!
2.2 已實現商用,預計成為2017年頂級品牌手機殺手锏
從技術角度來說,3D成像并不是近年才新出現的。自2009年微軟發布基��3D成像的游戲體感交互設備Kinect已經��8年時間,而Google的Project Tango也提出了4年。隨著圖像處理芯片技術的更新換代,AR需求的不斷涌現以及AI大數據技術的風起云涌,進一步坐實了一個事實:3D成像已經過了技術基礎期,即將進入長達5年以上的高速成長期��
2.2.1 微軟Kinect,體感識別游戲終��
2009��6��2日,微軟在東京電玩展上首次發布針對XBOX360的體感周邊外圍設備Kinect,當時的代號為Project Natal(初生計劃)。首日便超過了WII主機的發售數據,之后再以光速超越游戲市場上的所有記錄,讓微軟在北美乃至全球市場都可以揚眉吐氣。不僅如此,這樣具備著強大潛在實力的技術吸引了多達世界��8成左右的游戲廠商加盟,為后續的游戲產業鏈奠定了堅實的基礎��

Kinect徹底顛覆了以往游戲的人機交互方式,相比對手任天堂Wii依靠游戲桿上的傳感器Wii Remote識別用戶動作的限制,Kinect不需任何手持設備,能捕捉玩家全身上下的動作,直接用身體來進行游戲,帶給玩��“免控制器的游戲與娛樂體驗”,也讓游戲類型更加豐富��


Kinect V1采用PrimeSense��2013年被蘋果收購)結構光方案,硬件上由三個鏡頭組成,中間的鏡頭是 RGB 彩色攝像頭,用來采集彩色圖像。左右兩邊鏡頭則分別為紅外激光發射器和紅外CMOS 攝像頭所構成��3D結構光深度感應器,用來采集深度數據(場景中物體到攝像頭的距離)。彩色攝像頭最大支��640��480分辨率成像,紅外攝像頭最大支��320��240成像。同時,Kinect V1還搭配了追焦技術,底座馬達會隨著對焦物體移動跟著轉動。Kinect V1也內建陣列式麥克風,由四個麥克風同時收音,比對后消除雜音,并通過其采集聲音進行語音識別和聲源定位��
 #p#分頁標題#e#
#p#分頁標題#e#
PrimeSense的結構光方案,通過Infrared projector發射一副具有三維縱深的“立體”編碼近紅外激光(光源通過準直鏡頭和DOE器件形成衍射光斑),再通過接收端的Infrared camera收集經人體反射回來的紅外光線。這種光斑具有高度的隨機性,而且隨著距離的不同會出現不同的圖案,也就是說在同一空間中任何兩個地方的散斑圖案都不相同。只要在空間中打上這樣的結構光然后加以記憶就讓整個空間都像是被做了標記,然后把一個物體放入這個空間后只需要從物體的散斑圖案變化就可以知道這個物體的具體位置��
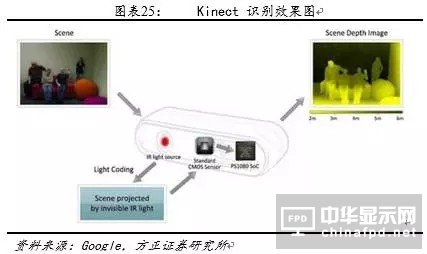
當然,首先后臺需要保存空間標定數據,假設Kinect規定的用戶空間是距離電視機的1米到4米范圍,每��10cm取一個參考平面,那么標定下來我們就保存��30幅散斑圖像,需要進行測量的時候,拍攝一副待測量的散斑圖像,作為基準數據信息。將這幅圖像和我們保存下來的基準數據信息依次做互相關運算,這樣我們會得到30幅相關度圖像,而空間中的物體存在的位置,在相關圖像上會顯示出峰值,把這些縫制一層層疊加在一起,在經過插值運算就會得到整個場景的三維形狀了��
2.2.2 Google Project Tango�� 全球首款AR智能手機
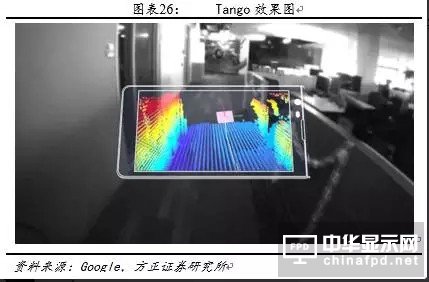
Tango在谷歌已存在4年時間,2013年初谷歌的ATAP(先進科技與計劃)團隊就已開始著手相關的研發。Project Tango的技術主要是使用傳感器和攝像頭來對室內建筑進行3D建模,同時還具備無限寬廣的應用場景,包括繪制3D地圖,幫助盲人在陌生的地方導航,讓人們能利用家中的環境玩擬真��3D游戲等��
2014��2月,Project Tango的原型機亮相,只面對開發者提供首��200臺原型機。根據拆機圖片,前置攝像頭已省去,后置包��4顆鏡頭,分別是普通的400萬像�� RGB攝像頭,用于3D成像的紅外發射器和紅外接收器,以及一顆魚眼鏡頭用于動作捕捉。這三顆攝像頭模組均由大陸模組廠商舜宇光學提供��
另值得一提的是,硅谷初創公司Movidius��2016��9月被Intel收購)的處理器用于輔助CPU進行圖像的運算處理。整機配有一顆容��3000mAh容量的鋰電池��

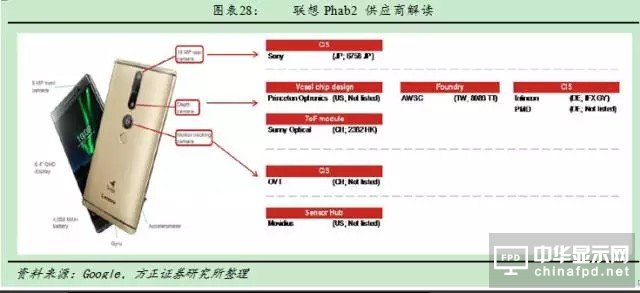
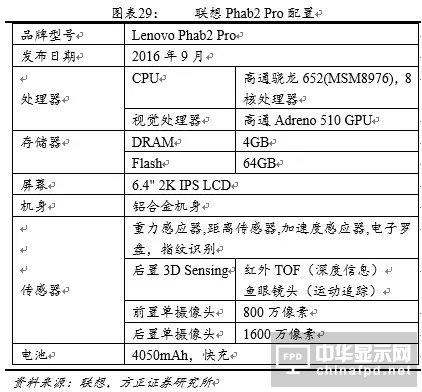
搭載Tango的首款商用機型聯想Phab2 Pro��2016年Tech World大會正式發布,價格為499美元,Phab2 Pro尺寸達到��6��4"。同時,配有全金屬機身和2��5D蓋板玻璃��
由于PrimeSense被蘋果收購,Google在Phab 2 Pro改用TOF技術進行3D 成像,設有三種攝像頭:最上方一顆是三星��1600萬像素RGB CMOS攝像頭,用于常規拍照;最下方是OV魚眼鏡頭,用于動作捕捉;兩者之間則是TOF系統構成,有上方的Princeton提供的IR VCSEL,和下方英飛凌及pmd共同提供的IR Depth sensor。這三顆攝像頭模組均由大陸模組廠商舜宇光學提供��
為了提供三維場景,三種攝像頭各司其職,并與其它傳感器“合作”,以實現以下功能��
��1)運動追蹤(Motion Tracking):通過移動設備自帶的多種傳感器,在不通過外界信號的情況下,實時獲取設備的姿態與位置,追蹤設備在三維空間中的運動軌跡。Tango創新性地采用了攝像頭與慣性測量單位(IMU)結合的方法來實現精確的運動追蹤功能��
��2)環境學習(Area Learning):利用視覺信息記錄與索引外界環境,自動矯正環境構建與運動追蹤中積累的誤差,識別重復環境。該功能描述起來很容易,但實施起來則相當的困難,首先設備會對其拍攝的每一幀照片提取特征,然后對出現的特征進行保存和引索,再利用一些高效的儲存和搜索算法,實時地判斷新的一幀是否跟過去曾經拍攝的環境有相似之處,如果匹配準確的話,設備可以立即利用之前已經收集的環境信息��
��3)深度感知(Depth Perception):利用自帶的三維飛行時間攝像頭掃描外界三維環境,構筑三維模型,再配合運動追蹤,即可告訴設備在空間中的位置,與四周障礙物的距雀��
2.3 成本:有望實現對傳統生物識別的替代,性價比極��
正如我們上文所述,如果��3D成像搭載在手機前置攝像機,可以通過利用人臉識別完成屏幕解鎖,同時可以利用虹膜識別完成密碼支付,其安全性將強于目前的指紋識別��
2.3.1 成本增加較少,安全性更��
經過我們的測算,以頂級客戶方案為例,目前其BOM成本不超��15美元,而前��3D成像完全可以實現對Touch模組的替代,而后者目前BOM成本約在6��7美元,所��3D成像實際增加成本��5��10美元,成本增加并不明顯��
2.3.2 手機可以做到屏幕占比很高
3D成像除了更安全,實現更多功能以外,也符合蘋果的持續追求的外觀目標:增加屏幕在手機中的占比。從iPhone4開始,通過窄邊框提升屏幕在手機正面占比,而OLED顯示的成熟更可以充分利用正面有效面積,而這時龐大的Touch區域已經顯的非常礙眼了,所以從我們產業了解到信息,手機廠一直有強烈的意愿取消掉前置的Touch模組,��3D成像正好完美解決這一痛點��
2.4 廠商意愿:目前了解到國產大廠跟進意愿極��
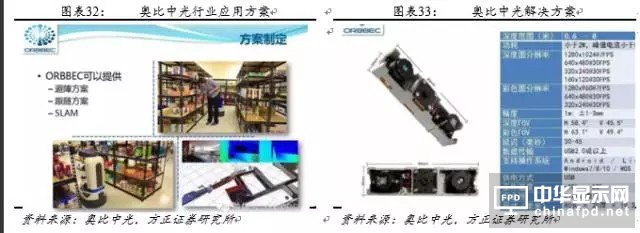
結構光方案最主要的玩家PrimeSense被蘋果收購后,部分客戶轉向了TOF方案,但是仍然有方案公司繼續在結構光領域探索。深圳的奧比中光便是其中的代表,目前其結構光方案已經較為成熟,可以商用在機器人、無人機導航等領域,同時手機微型化的方案也正是推出��
目前我們了解到國產手機大廠對于3D成像需求非常迫切,跟進意愿極強,已經開始尋找PrimeSense以外的結構光方案合作商,而奧比中光正好彌補了這一缺口��
3��3D成像將是下一個爆發式的創��
3.1 回顧觸控和雙攝,真正的革命滲透速度極快,享受估值溢��
3.1.1 觸摸屏曾經的輝煌,大陸電子產業的啟蒙
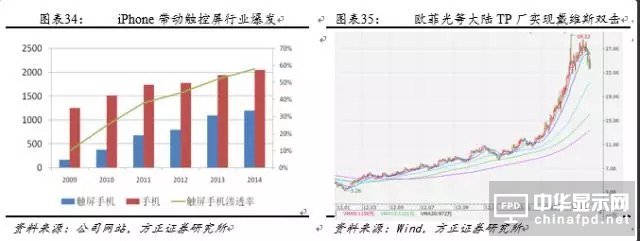
大陸電子產業,尤其是上市公司,在2010年以切入蘋果產業為標志,享受下游需求快速增長的同時,也實現了對臺灣供應鏈的節節勝利。其中觸摸屏可謂是行業的啟蒙者:1)自iPhone帶動以后,觸摸屏��2010年以后實現爆發式成長��2)以萊寶高科為例切入蘋果產業鏈以后業績的突飛猛進也讓市場記憶深刻;3)隨后國產手機的跟進,造就了一批歐菲、合力泰、信利等觸控的大牛股��
 #p#分頁標題#e#
#p#分頁標題#e#
蘋果產業開始推動大陸資本市場對于電子的研究范式大為革新,市場認識到電子行業也是成長股的搖籃��7年以后的今天,雖然市場擔心創新放緩,但是任何快速滲透的技術都不應該忽視,真正的革命能夠享受估值溢價��
3.1.2 雙攝帶動攝像頭空間翻倍,微創新也有大能量
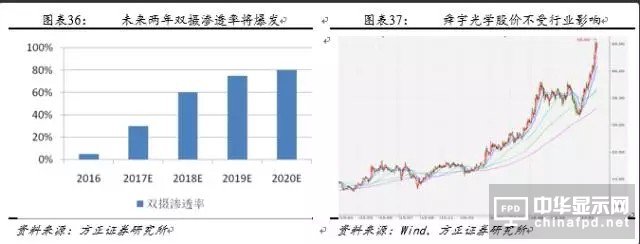
最近一個快速滲透的例子就是雙攝像頭,自iPhone7推出以后,雙攝已經成為高端手機的標配,其滲透速度也經歷快速爆發,即使在手機增長放緩的背景下,舜宇、大立光、丘鈦等相關公司也實現了戴維斯雙擊��
舜宇等公司不是個例,我們認為其股價持續創新高,體現了光學杰出的行業屬性,即使是雙攝像頭個數的創新就能帶動行業持續成長��
3.2 預期差極大,產業和資本認識不��
3.2.1 大陸臺灣產業鏈參與少��3D成像預期差大
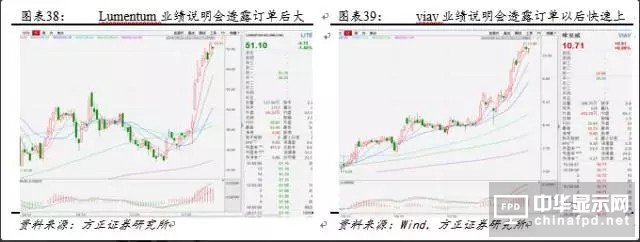
iPhone剛上市的時候保密性極佳,尤其是iPhone4上市著實給市場很大震撼,但隨著銷量規模的飛速成長和大陸臺灣公司越來越多的參與,iPhone創新提前走漏的案例比比皆是,大部分iPhone8的創新在2016年就已經提前被產業鏈所獲知,所以資本市場提前會有預期,但是這次3D成像保密性可謂前所未有,所以消息源是來自于美股的公司業績說明會透露的細節��
到目前為止,市場對于3D成像究竟用結構光還是TOF尚未認識完全,至于具體的產業鏈細節和工作原理更是知之甚少,所以這次光學變革預期差充足。市場一度有人猜測為蘋果將采用tof的成像方案,也側面說明了此次3D成像的保密的成功��
3.2.2 方正觀點:預計蘋果將采用前置結構光方案,融合虹膜識��
蘋果早在多年前已經開��3D成像的布局��2013年收購結構光主要方案是Primesense,同時也公布了US9519396B2(利用三維信息完成合成)、US8933876B2(三維空間手勢識別)、諸多線索指向蘋果未來的3D成像意圖��

從原理上來看,結構光只需要拍兩次照即可實��3D距離的探測,而tof成像延時較長,圖像分辨率偏低;同時由于結構光光斑較多,衍射范圍大,如果探測距離較遠容易影響精度,所以探測距離是結構光的劣勢��
蘋果2013年斥��3��45億美元收購Primesense,而Primesense正式結構光方案最主要的專利持有者。我們判斷蘋果的3D成像將會以前置的方式配置,考慮到在前置方案需要高精度、低延時,同時對于探測距離要求并不高,所以我們認為蘋果的3D成像將會是前置結構光的方式呈現��
同時,我們判斷在該方案中除了傳統的前置RGB攝像頭以外,會在兩側增加發射和接收端用于探測景深信息,其中接收端是特殊制程的CMOS,用于接收窄帶紅外光,同時該CMOS也會結合虹膜識別的功能��

3.2.3 從iPhone7的TOF傳感器窺探蘋果的3D成像布局
iPhone5開始,蘋果已經在距離傳感器上面小試牛刀,最早是將AMS的距離傳感器放置在聽筒附近,當接電話的時候利用紅外光飛行時間(time of flight)探測到臉部距離以后控制屏幕的亮度,實現更省電的方案��
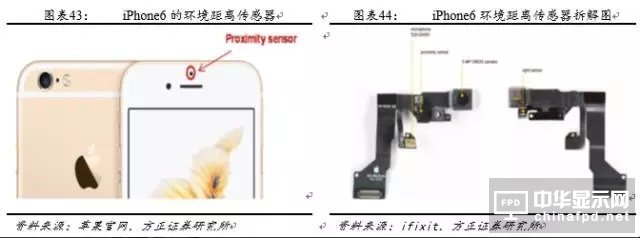
這一設計沿用到iPhone6S,直到iPhone7開始,蘋果將原來沿用的環境距離傳感器升級為更精確的TOF傳感器。在新的TOF方案中,利用高效率的VCSEL激光器和光子接受點陣SPAD作為發射和接收端,VCSEL發射��16個點陣激光,然后利用SPAD能夠探測到比單點距離傳感器更豐富的距雀��臉型等特征信息��
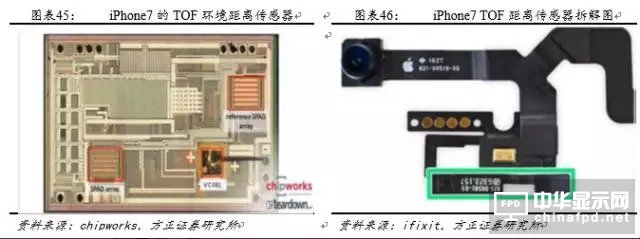
從這一變化可以看出,蘋果雖然前��3D成像不會使用TOF,但是對于TOF蘋果的態度也是開放的,考慮到TOF在遠距離景深探測的優勢,我們判斷在2018年以后TOF大概率將以后置攝像頭的形式出現。蘋果在3D成像的雄心絕對不容小視:前置實現手勢控制、人臉識別、虹膜識別等短距精確的功能,后置實現AI、AR等長距的功能��
4��3D成像爆發,潛在受益環節分析
4.1 關鍵器件被鎖定,嚴重供不應求,核心零組件擁有充分定價��
這次蘋果不僅領先了資本,還領先了產業,在蘋果精心的布局慢慢浮出水面后,產業發現蘋果早已將結構光產業的關鍵零組件進行了深度綁定,其他品牌廠難以完全復制��
所以,現在產業面臨的問題的快速爆發的需求和上游稀缺的產能,所以也不難理解國產品牌對此的深深憂慮,所以我們判斷現在的3D成像和去年的雙攝格局非常像,品牌廠為了追求新功能,只有不惜血本尋找有效產能,核心零組件公司將擁有充分定價權,坐擁數年的黃金成長期��
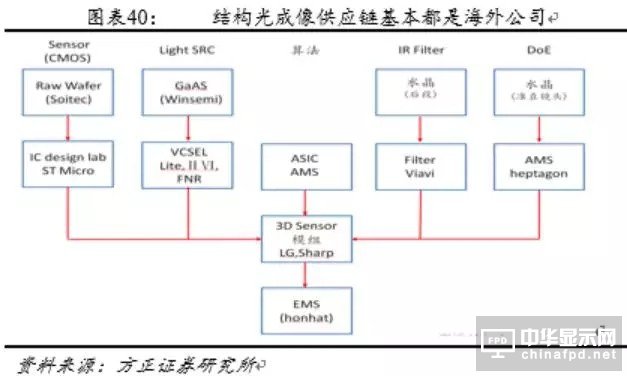
4.2 發射(LDM):高端光源被鎖定,準直鏡頭haptagon擁有專利
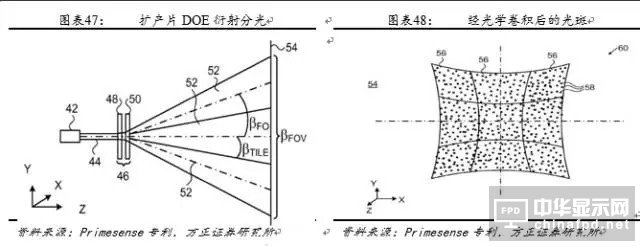
發射端主要由點光源VCSEL、準直鏡頭和擴散片DOE構成。大致原理是VCSEL發出940nm點激光之后通過準直鏡頭矯準為線性激光,線性激光照射在DOE上發生衍射,形成近千個具備調制信息的光斑(lighting code)。由于擴散片對于光束進行散射的角度(FOV)有限,所以需要光柵(見下圖)將散斑圖案進行衍射“復制”后,擴大其投射角度。這種“復制”效果被稱為光學卷積,能得到所需透射角度的散斑��
4.2.1 VCSEL光源:小型化、轉換效率高
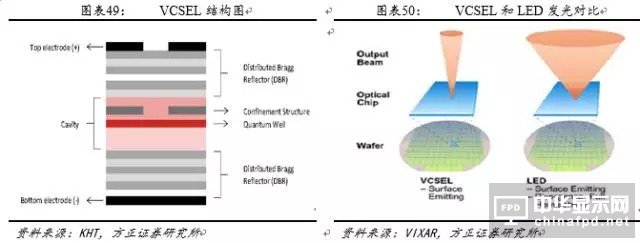
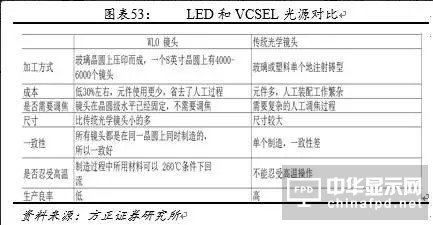
紅外光常被用��3D 成像,發射紅外線的光源可以是LED或激光。VCSEL(Vertical Cavity Surface Emitting Laser,垂直腔體表面發射激光器),具備體積小、光電轉換效率高、精度高、低成本、窄波瓣等特性,成為最適合消費電子使用的光源。波長一般選��940nm��
目前主流的VCSEL供應商是Lumentum、II-VI和Finisar,不排除都已經被頂級客戶深度綁定,我們測算下來,單個VCSEL的成本在1��5��2美金��

4.2.2 準直鏡頭:WLO工藝,大部分專利被haptagon掌握
利用光的折射原理,將波瓣較寬的衍射圖案校準匯聚為窄波瓣的近似平行光。目前大部分專利都掌握在haptagon收購的mesa手上。該鏡頭是利用WLO的工藝制程,我們判斷是4P的結構。其分為上下兩片的結構,其中每片中間是濾光片,由類似于水晶光電的鍍膜廠在白玻璃上鍍完AR膜以后交給haptagon,后者在玻璃上利用晶圓級工藝上下生長出replication material,并加工成透鏡的形狀,最后將兩片濾光片粘合并切割,完成WLO工藝的制作��#p#分頁標題#e#
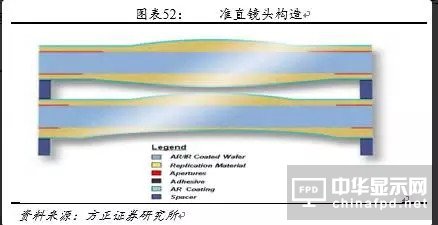
不同于普通的lens,一��8寸的白玻璃可以切割成數千顆準直鏡頭,而利用WLO工藝可以有效降低制造成本。相對普通的手機攝像頭lens,其缺點在于不能調焦,但是LDM本身只需要將定點的點光源轉換成線光源即可。經過我們調研,單顆準直鏡頭成本��2��3美金��
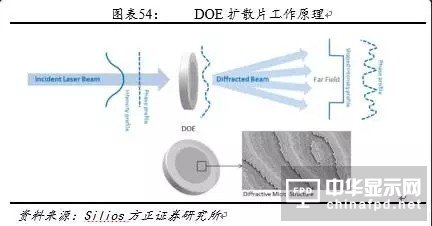
4.2.3 DOE擴散片:門檻高,供應商較多
DOE是利用光的衍射原理,將點光源轉換為散斑圖案(pattern)。先制作3維的母模,其3維圖像具備調制信息,然后母模再制作鏡頭。制作出的鏡頭擁��3維的圖案,同時間隔都在微米級別,線性激光通過的時候發射衍射,同時衍射的角度和個數是受pattern影響的,衍射出來的光斑具備lighting code的信息��
我們預計,目前DOE擴散片主要有德國的CDA公司制作,ASP��2��3美金��
4.3 接收端:融合虹膜識別,low pass filter是主要瓶��
4.3.1 Low pass filter只有兩家供應商,充分享受行業爆發
相對于LDM,接收端相對要簡單很多,主要是lens、pass filter和特制CMOS構成。由于接收端主要是接收反射回來的lighting code來生成對象景深信息,所以只需要通過940nm的紅外光即可,在lens下面的pass filter需要過濾掉其他多余的光線,而該窄帶pass filter制作工藝遠大于傳統的濾光片(需要鍍50層膜實現窄帶帶通,同時為保證透光性,不能使用蒸鍍工藝),目前基本只有美國的VIAV和中國東部某濾光片大廠擁有。而從VIAV的業績說明會來看,也驗證其獲得國際頂級手機客戶的訂單意向,考慮到該行業僅有兩家供應商,該客戶巨大的出貨量,將為VIAV帶來充足的業績彈性��
根據我們的產業鏈調研,接收端lens不超��1美金,pass filter��0��6美金��
4.3.2 特制紅外CMOS,融合虹膜識別功��
該CMOS和普通的RGB不一樣,因為主要是接收反射回來的lighting code,發射光在通過Low pass filter之后,本身就是窄帶光,所以不需要其他波長的感光點。而由于LDM的光斑本身不超過千個,接收反射光也不需要太高的像素,每幅圖像素不會超過2056��1024,所��2M像素的CMOS即可��
另外,該CMOS也融合了虹膜識別功能,我們判斷在前置模組中還包含一顆類似波段的紅外LED,用于照射虹膜,反射光照射在特制CMOS上實現虹膜識別��
經過我們的測算,我們判斷該CMOS的ASP不超��2美金��
4.4 模組廠:ASP接近雙攝,攝像頭模組廠受��
從我們上面的分析可以看出,LDM單價��7美金左右,接收端��3美金左右,整個發射、接收和前置RGB攝像頭做成一個模組,目前主要是LG和sharp在配合前期開發,我們認為普通的攝像頭模組廠如舜宇、歐菲、丘鈦等也有能力進行配合,所以攝像頭模組廠也會受益于前置攝像頭單價的提升��
5、投資建��
我們認��3D成像未來兩年將實現快速普及,目前存在強烈的預期差,強烈看好產業鏈具備核心競爭力的公司,首推濾光片龍頭水晶光電,看好核心器��
VCSEL:LITE.O、II-VI.O、FNSR.O
VCSEL晶圓:Winsemi
準直鏡頭:AMS.SIX
CMOS芯片:STM.N
CMOS wafer:Tong Hsing
模組公司:LGI、Sharp,另外舜宇、歐菲光、丘鈦等大概率受益��
6、風險提��
客戶推進不及時;耗電量過大影響待機;手機銷量不及預期��

關注我��

公眾號:china_tp
微信名稱:亞威資��
顯示行業頂級新媒��
掃一掃即可關注我��
產品供求| 雜志期刊| 協會服務| 專題��| 關于我��|網站地圖|版權聲明| 廣告服務
Copyright © 2018 深圳市美嘉投資有限公��. All Rights Reserved 版權所�� 粵ICP��12048185��-1
中華顯示網所載文章、數據僅供參考,使用前務請仔細閱讀法律聲明,風險自負��


媒體合作:0755-86149081 廣告咨詢:0755-86149131 Email:[email protected]